This is a guest post by Donggyu Kim, who recently posted about the cycles of ribbon graphs. In this post, Donggyu introduces a generalisation of orientable ribbon graphs, pseudo-orientable ribbon graphs, based on recent work with Changxin Ding [2].
In my previous post, we saw that orientable ribbon graphs admit principally unimodular matrix representations. More precisely, for any orientable ribbon graph $\mathbb{G}$ and quasi-tree $X$, there exists a principally unimodular matrix $\mathbf{A}$ such that
$$\det(\mathbf{A}[Q \triangle X]) =\begin{cases}1 & \text{if $Q$ is a quasi-tree},\\0 & \text{otherwise},\end{cases}\qquad\qquad\tag{$*$}$$
where $Q\triangle X:= (Q\setminus X) \cup (X\setminus Q)$ denotes the symmetric difference of $Q$ and $X$, and $\mathbf{A}[Q \triangle X]$ is the principal submatrix of $\mathbf{A}$ indexed by $Q \triangle X$.
As noted in the previous post, the construction of such a matrix $\mathbf{A}$ relies heavily on the orientability of $\mathbb{G}$, and indeed it is not hard to find non-orientable ribbon graphs that do not admit such PU matrix representations.
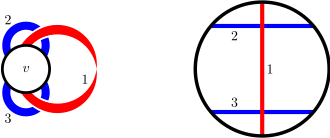
Today, I will introduce a new class of ribbon graphs, called pseudo-orientable, which generalizes orientable ribbon graphs and admits PU matrix representations satisfying (*). For simplicity, we will restrict our attention to bouquets, that is, ribbon graphs with a single vertex. However, the results extend easily to general ribbon graphs by making use of the partial duality introduced by Chmutov [1]. We will also identify bouquets with signed chord diagrams; see Figure 1.
A bouquet (left) with three edges, where the edge $1$ is twisted/non-orientable (red) and the edges $2$ and $3$ are untwisted/orientable (blue). The corresponding signed chord diagram (right) is obtained by drawing chords on the boundary of the vertex and assigning signs (in this figure, the colors red and blue) to the chords according to the orientability of the corresponding edges.
Pseudo-orientability
Let’s begin by defining pseudo-orientable bouquets.
Definition. A bouquet $\mathbb{G}$ is pseudo-orientable if the boundary of the vertex admits two closed segments $S_1$ and $S_2$ such that
$S_1 \cap S_2$ is the set of two distinct points,
for each orientable edge, both of its ends lie in the interior of the same segment, either $S_1$ or $S_2$, and
for each non-orientable edge, one end lies in the interior of $S_1$ and the other end lies in the interior of $S_2$.
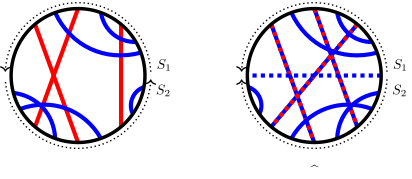
See Figure 2 (left) for an example of a pseudo-orientable bouquet.
The adjustment $\widehat{\mathbb{G}}$ of $\mathbb{G}$ at $(S_1,S_2)$ is the orientable bouquet obtained in the following way:
Cut the bouquet along $S_2$ and then reglue it with a half-twist. Note that all edges are orientable in the new bouquet.
Add a new orientable edge, denoted by $\widehat{e}$, connecting the two points in $S_1\cap S_2$.
Figure 2 (right) illustrates the resulting orientable bouquet $\widehat{\mathbb{G}}$.
The left figure is a pseudo-orientable bouquet $\mathbb{G}$, whose orientable edges are colored blue and non-orientable edges are colored red. A pair $(S_1,S_2)$ is indicated by dotted arrows. The right figure is the adjustment $\widehat{\mathbb{G}}$ of $\mathbb{G}$ at $(S_1,S_2)$, obtained by flipping the bottom segment $S_2$. The three blue-red dashed lines indicate orientable edges that were non-orientable in $\mathbb{G}$. The new edge $\widehat{e}$ is depicted as the blue dashed line. All edges in $\widehat{\mathbb{G}}$ are orientable.
Every orientable bouquet is pseudo-orientable, because we can get a pair $(S_1,S_2)$ by letting $S_1$ be a small boundary segment containing no ends of edges, and $S_2$ be the remaining boundary segment.
We also remark that the class of pseudo-orientable ribbon graphs is closed under taking ribbon graph minors.
PU matrix representations for pseudo-orientable bouquets
The Matrix–Quasi-tree Theorem for pseudo-orientable bouquets is as follows.
Theorem. Let $\mathbb{G}$ be a pseudo-orientable bouquet. Then there is an $E(\mathbb{G})$-by-$E(\mathbb{G})$ matrix $\mathbf{M}$ such that
$$\det(\mathbf{M}[Q])=\begin{cases}1 & \text{if $Q$ is a quasi-tree},\\0 & \text{otherwise}.\end{cases}$$
In particular, $\det(\mathbf{I} + \mathbf{M})$ is the number of quasi-trees of $\mathbb{G}$.
Remarkably, the matrix $\mathbf{M}$ is neither skew-symmetric nor symmetric in general, but can be expressed as the sum of a skew-symmetric matrix and a rank-one symmetric matrix. The theorem follows from two parallel stories on ribbon graphs and matrices, with delta-matroids underlying both.
For a subset $S$ of $[n]:=\{1,2,\ldots,n\}$, let
$$\widehat{S} :=\begin{cases}S & \text{if $|S|$ is even},\\S\cup\{n+1\} & \text{if $|S|$ is odd}.\end{cases}$$
Ribbon graphs. Let $\mathbb{G}$ be a pseudo-orientable bouquet, and let $\widehat{\mathbb{G}}$ be an adjustment of $\mathbb{G}$. We set $E(\mathbb{G}) = [n]$ and $\widehat{e} = n+1$. Then the following equivalence holds:
$$\text{$Q$ is a quasi-tree of $\mathbb{G}$} \iff \text{$\widehat{Q}$ is a quasi-tree of $\widehat{\mathbb{G}}$}.\tag{1}$$
Matrices. Let $\mathbf{A}$ be an $(n+1)$-by-$(n+1)$ PU skew-symmetric matrix representing $\widehat{\mathbb{G}}$. We can write it as
By the property (*) of the matrix $\mathbf{A}$ representing $\widehat{\mathbb{G}}$ (with $X=\emptyset$) together with (1) and (2), we deduce the theorem.
Delta-matroids. Delta-matroids are already lurking in the two pictures above. Recall that a ribbon graph gives rise to a delta-matroid via its quasi-trees, and a (skew-)symmetric matrix gives rise to a delta-matroid via the index sets of nonsingular principal submatrices. Moreover, the delta-matroid associated with an orientable ribbon graph is even. What, then, can we say about the delta-matroid associated with a pseudo-orientable ribbon graph?
A delta-matroid $D$ is strong if it satisfies the simultaneous basis exchange property: for any bases $B,B’$ and $x\in B\triangle B’$, there is $y\in B\triangle B’$ such that $B\triangle\{x,y\}$ and $B’\triangle\{x,y\}$ are bases.
Every matroid, even delta-matroid, and ribbon-graphic delta-matroid is strong, but not every delta-matroid is. For example, the delta-matroid $([3],\{\emptyset,\{1\},\{2\},\{3\},\{1,2,3\}\})$ is not strong.
Murota [4] gave a concise relationship between strong and even delta-matroids, attributing it to Geelen:
Proposition. Let $D = ([n],\mathcal{B})$ be a set system. Then $D$ is a strong delta-matroid if and only if $\widehat{D} := ([n+1],\widehat{\mathcal{B}})$ is an even delta-matroid, where $\widehat{\mathcal{B}} := \{ \widehat{B} : B\in\mathcal{B} \}$.
Finally, pseudo-orientable ribbon graphs are precisely those ribbon graphs $\mathbb{G}$, up to ribbon graph $2$-isomorphism [3], for which $\widehat{D(\mathbb{G})}$ is ribbon-graphic — this characterization captures our original motivation for the study [2].
Acknowledgements
I thank Changxin Ding and Jorn van der Pol for helpful comments.
References
[1] Sergei Chmutov. Generalized duality for graphs on surfaces and the signed Bollobas–Riordan polynomial. J. Combin. Theory Ser. B 99(3):617–638, 2009. doi:10.1016/j.jctb.2008.09.007 [2] Changxin Ding and Donggyu Kim. Pseudo-orientable ribbon graphs: Matrix–Quasi-tree theorem and log-concavity, 2026. arXiv preprint. [3] Iain Moffatt and Jeaseong Oh. A 2-isomorphism theorem for delta-matroids. Adv. in Appl. Math. 126, Paper No. 102133, 2021. doi:10.1016/j.aam.2020.102133 [4] Kazuo Murota. A note on M-convex functions on jump-systems. Discrete Appl. Math. 289:492–502, 2021. doi:10.1016/j.dam.2020.09.019
This is a guest post by Donggyu Kim, who discusses the cycles of an embedded graphs (ribbon graphs) and their interactions with the associated delta-matroids. It is based on joint work with Matt Baker and Changxin Ding [1].
Ribbon graphs and quasi-trees
An embedded graph $G$ is a graph cellularly embedded in a closed (possibly non-orientable) surface $\Sigma$. We think of vertices and edges as disks and rectangles, obtained by thickening the points and lines by a sufficiently small $\epsilon>0$ in the surface $\Sigma$. In this sense, embedded graphs are often called ribbon graphs; we will use the two notions interchangeably.
A typical example of an embedded graph is a connected plane graph – but instead of embedding the graph in the plane, let’s embed it on the sphere! One easy exercise is that a spanning subgraph $T$ is a spanning tree if and only if it, viewed as a ribbon graph, has a unique boundary component. However, these two notions diverge when the surface $\Sigma$ is not the sphere. Every spanning tree has a unique boundary component, but the converse doesn’t hold. We call a spanning subgraph with a unique boundary component a quasi-tree. The figure below depicts an embedded graph on the torus $\mathbb{T}^2$; it has a quasi-tree that is not a spanning tree. Since quasi-trees capture topological information, they are the right analog of spanning trees for embedded graphs.
Figure 1. A plane graph (an embedded graph on the sphere $\mathbb{S}^2$, left) and the corresponding ribbon graph (middle). The spanning subgraph with edge set $\{1,4,5\}$ (top right) has a unique boundary component as a ribbon graph, whereas the spanning subgraph with edge set $\{1,2,5\}$ (bottom right) has three boundary components – don’t miss the boundary of the degree-$0$ vertex.
Ribbon cycles
Question. We have seen that quasi-trees are the right analog of spanning trees for embedded graphs. What should play the role of cycles?
Before answering the question, let’s fix a convention. Since we’ll only care about the topological properties – such as whether $\Sigma – H$ is connected for a subgraph $H$ (we’ll make this more precise below) – every subgraph in this post will be assumed to be spanning (i.e., containing all vertices of the original graph). Hence, we will identify an edge set with the corresponding spanning subgraph. Moreover, we may view $\Sigma – H$ either as removing $H$ as a graph or as a ribbon graph. These two viewpoints are homeomorphic, so the reader may adopt whichever is more convenient.
With this convention in place, let’s return to the plane case (Figure 1). For any cycle $C$, the surface $\Sigma – C$ is disconnected; indeed, the cycles are exactly the minimal subgraphs with this property. What happens for general embedded graphs? Consider Figure 2. Even after removing any cycle from the torus $\mathbb{T}^2$, it remains connected. Moreover, there is no subgraph $H$ for which $\Sigma – H$ is disconnected.
Figure 2. A graph embedded on the torus (left) and the corresponding ribbon graph (right). It has four quasi-trees with edge sets $\{1\}$, $\{2\}$, $\{3\}$, and $\{1,2,3\}$.
Ordinary cycles alone cannot be the right answer on a general surface. To fix this, we need to bring the dual graph into the picture. Let us draw both the graph $G$ embedded on the torus, shown in Figure 2, and its geometric dual $G^*$ simultaneously; see Figure 3. The graph $G$ is drawn in black, and the dual $G^*$ is drawn in red. We can then separate the torus $\mathbb{T}^2$ into two components by removing a cycle $\{1,2\}$ of $G$ together with a cycle $\{3^*\}$ of $G^*$.
Figure 3. The embedded graph $G$ in Figure 2 together with its dual $G^*$. It has four ribbon cycles: $\{1,2,3^*\}$, $\{1,2^*,3\}$, $\{1^*,2,3\}$, and $\{1^*,2^*,3^*\}$.
Denote $E:=E(G)$ and $E^*:= E(G^*) = \{e^*:e\in E\}$. A subset $S \subseteq E\cup E^*$ is a subtransversal if it contains at most one of $e$ or $e^*$ for each edge $e\in E$.
Definition. Let $G$ be an embedded graph on $\Sigma$. A ribbon cycle of $G$ is a subtransversal $C \subseteq E\cup E^*$ that minimally separates the surface $\Sigma$, meaning that $\Sigma – C$ is disconnected while $\Sigma – C’$ is connected for every $C’\subsetneq C$.
If $G$ is a plane graph, then the ribbon cycles are exactly the cycles and the stars of bonds. For example, the ribbon cycles of the plane graph in Figure 1 (see also Figure 4) are
$\{1,2,5\}$, $\{3,4,5\}$, $\{1,2,3,4\}$, $\{1^*,2^*\}$, $\{3^*,4^*\}$, $\{1^*,3^*,5^*\}$, $\{1^*,4^*,5^*\}$, $\{2^*,3^*,5^*\}$, and $\{2^*,4^*,5^*\}$.
Figure 4. The plane graph in Figure 1 (black) and its geometric dual (red).
The embedded graph on the torus in Figure 3 has four ribbon cycles:
$\{1,2,3^*\}$, $\{1,2^*,3\}$, $\{1^*,2,3\}$, and $\{1^*,2^*,3^*\}$.
Each ribbon cycle $C$ is a union of cycles in $G$ and cycles in $G^*$. In other words, $C\cap E$ forms an Eulerian subgraph of $G$, and $C\cap E^*$ forms an Eulerian subgraph of $G^*$. The ribbon cycle $\{1^*,2^*,3^*\}$ consists of three cycles – $\{1^*\}$, $\{2^*\}$, and $\{3^*\}$ – which share a common vertex.
The following is an amusing exercise, a counterpart of the orthogonality of cycles and bonds in ordinary graphs. For an edge $e$ of an embedded graph $G$, we denote $(e^*)^* = e$, and write $C^* := \{e^* : e\in C\}$ for any subset $C\subseteq E\cup E^*$.
Exercise (Orthogonality). Let $C_1$ and $C_2$ be two ribbon cycles of $G$. Then $|C_1\cap C_2^*| \ne 1$.
Circuits of ribbon-graphic delta-matroids
Now that we have a topological candidate for the “cycles” of a ribbon graph, the next question is whether the delta-matroid associated with the ribbon graph captures the same objects. Carolyn Chun explained earlier that the quasi-trees of an embedded graph $G$ form the bases of a delta-matroid, denoted $D(G)$.
A graph gives rise to its graphic matroid in (at least) two familiar ways: by collecting maximal acyclic sets, we obtain the bases; by collecting cycles, we obtain the circuits. Thus one may ask whether the ribbon cycles of an embedded graph $G$ are the circuits of $D(G)$. However, there are two hurdles. First, the ground sets do not match, $E$ vs. $E\cup E^*$. Second, the bases of a delta-matroid are not equicardinal—which raises a problem, since bases cannot in general be recovered from circuits if the circuits are defined as minimal subsets not contained in any basis.
These issues can be easily resolved by introducing symmetric matroids [2] (also known as 2-matroids; see Irene Pivotto’s post), which are a homogenized version of delta-matroids.
Let $D = (E,\mathcal{B})$ be a finite set system. Then $D$ is a delta-matroid if and only if $\mathrm{lift}(D) := (E\cup E^*, \mathcal{B}’)$ is a symmetric matroid, where $\mathcal{B}’ := \{B\cup (E\setminus B)^* : B\in \mathcal{B}\}$. Since all bases of a symmetric matroid have the same cardinality, it makes sense to define its circuits. A circuit of a symmetric matroid is a minimal subtransversal that is not contained in any basis.
Now we can state the following:
Theorem. The circuits of $\mathrm{lift}(D(G))$ are exactly the ribbon cycles of an embedded graph $G$.
To prove this, let us first see equivalent characterizations of quasi-trees. Recall that a quasi-tree $Q$ is a spanning subgraph with a unique boundary component. Hence, $\Sigma-Q$ also has a unique boundary component, which implies that $\Sigma-Q$ is connected. The following folklore result says that an even stronger statement holds.
Proposition. For $Q\subseteq E(G)$, the following are equivalent:
$Q$ is a quasi-tree of $G$.
$(E\setminus Q)^*$ is a quasi-tree of the dual $G^*$.
$\Sigma – Q – (E\setminus Q)^*$ is connected.
We also note the following corollary orthogonality.
Exercise. For any subtransversal $S\subseteq E\cup E^*$ such that $\Sigma – S$ is connected, there is a transversal $T$ (that is, a subtransversal of size $|E|$) containing $S$ such that $\Sigma – T$ is still connected.
Hence, quasi-trees $Q$ can be identified with “maximal subtransversals $Q\cup (E\setminus Q)^*$ whose removal does not disconnect the surface,” whereas ribbon cycles are “minimal subtransversals whose removal disconnects the surface.” This proves the theorem above. Great! Ribbon cycles really are the right circuit-like objects.
Representations of ribbon-graphic delta-matroids via signed ribbon cycles
A natural next question is whether other familiar graph/matroid correspondences also survive in the ribbon-graph world. For example, if $G$ is an ordinary connected graph with an arbitrary orientation, we can quickly find a regular representation of $M(G)$ by examining the fundamental bonds with respect to a spanning tree:
Fix a spanning tree $T$.
For each $e\in E(T)$, let $C_e$ be the unique bond in the complement of $T-e$, called the fundamental bond of $e$ with respect to $T$.
Since a reference orientation of $G$ is given, we can identify $C_e$ with a $(0,\pm 1)$-vector (of course, this is determined up to sign, and we may choose either sign).
Construct a real $(|V|-1)$-by-$|E|$ matrix $\mathbf{A}$ by taking the vectors $C_e$ as its rows.
Then $\mathbf{A}$ is a totally unimodular matrix representing $M(G)$. In the same way, one can construct a totally unimodular matrix representing $M^*(G)$ by examining the fundamental cycles.
Remarkably, almost the same construction works for “orientable” ribbon graphs. Fix one of the two orientations of $\Sigma$. Here we choose the counterclockwise orientation with respect to normal vectors, the so-called right-hand rule. Fix a reference orientation for $G$. Then we can assign the corresponding dual reference orientation to $G^*$; see the figure below.
Figure 5. For each oriented edge $e$, we assign the dual orientation of $e^*$ as depicted on the left. The illustration on the right shows a reference orientation of $G$ in Figure 3 together with the corresponding dual reference orientation of $G^*$.
The point of the next four steps is to construct a matrix representing $\mathrm{lift}(D(G))$ from signed ribbon cycles.
Fix a quasi-tree $Q$. Denote $B := Q\cup (E\setminus Q)^*$.
For each $e \in E(G)$, let $C_e$ be the ribbon cycle in $B\triangle\{e,e^*\}$, which always exists and is unique!
We identify $C_e$ with a $(0,\pm 1)$-vector $\mathbf{v}_e$ in $\mathbb{R}^{E\cup E^*}$ defined as follows:
$\Sigma-C_e$ separates the surface into two components. Choose one of them, say $\Sigma’$.
$C_e$ is exactly the boundary of $\Sigma’$. Because $\Sigma’$ is oriented, we obtain a $(0,\pm 1)$-vector $\mathbf{v}_e$ supported on $C_e$ by setting \[\mathbf{v}_e(f) =\begin{cases}+1 & \text{if the orientation of $f\in C_e$ agrees with that of $\Sigma’$}, \\-1 & \text{if the orientation of $f\in C_e$ is opposite to that of $\Sigma’$}, \\0 & \text{if $f\notin C_e$}.\end{cases}\]
Construct a real $|E|$-by-$2|E|$ matrix $\mathbf{A}$ by taking the vectors $\mathbf{v}_e$ as its rows.
Proposition. Let $X$ be a transversal of $E\cup E^*$. Then $X \cap E$ is a quasi-tree of $G$ if and only if the $|E|$-by-$|E|$ submatrix $\mathbf{A}[(E\cup E^*) \setminus X]$ with columns $(E\cup E^*) \setminus X$ is nonsingular; in fact, its determinant is $\pm 1$.
Let’s see an example in the following figure.
Figure 6. Choose a quasi-tree $Q = \{1,2,3\}$. Then the ribbon cycles defined in Step 2 are $C_1 = \{1^*,2,3\}$ (left), $C_2 = \{1,2^*,3\}$ (middle), and $C_3 = \{1,2,3^*\}$ (right). The removal of each ribbon cycle $C_i$ from the torus $\mathbb{T}^2$ disconnects it into two components. In Step 3(a), we color $\Sigma’$ yellow.
The vectors $\mathbf{v}_i$ defined in Step 3(b) are
The entries in the first row are indexed by $1,2,3$ from left to right, and the entries in the second row are indexed by $1^*,2^*,3^*$ from left to right. Thus, the resulting matrix $\mathbf{A}$ in Step 4 is
where the columns are indexed by $1,2,3,1^*,2^*,3^*$ in this order. You can check that the matrix $\mathbf{A}$ satisfies the proposition.
After multiplying some rows by $-1$ and rearranging the columns, the matrix $\mathbf{A}$ in the proposition can be written as a matrix of the form $\left( \begin{array}{c|c} \mathbf{I}_n & \mathbf{S} \end{array} \right)$, where $\mathbf{I}_n$ is the identity matrix with size $n:=|E|$ and $\mathbf{S}$ is a principally unimodular skew-symmetric matrix. An equivalent construction of $\mathbf{S}$ was first given by Bouchet [2] in terms of (principally) unimodular orientations of circle graphs. If you are curious about the relationship between the above matrix construction and Bouchet’s construction, see Appendix A of [1]. Merino, Moffatt, and Noble [3] pointed out that
\[\det(\mathbf{I}_n + \mathbf{S}) = \# \text{quasi-trees of $G$},\]
The above matrix construction depends strongly on the orientability of the surface. This appears explicitly in Step 3, where we choose the signs of the entries of the $(0,\pm 1)$-vector $\mathbf{v}_e$. It is also implicit in Step 2, since we cannot guarantee the existence of $C_e$ when the surface is non-orientable.
Question. How about non-orientable ribbon graphs? Could we also obtain nice representations by unimodular matrices?
The short answer is: yes for some non-orientable ribbon graphs, but not for every ribbon graph. I will continue this discussion in the next post. See you then!
Acknowledgements. I thank Matt Baker, Changxin Ding, and Jorn van der Pol for helpful comments.
References
[1] Matthew Baker, Changxin Din, and Donggyu Kim. The Jacobian of a regular ortogonal matroid and torsor structures of quasi-trees of ribbon graphs, 2025. arXiv preprint.
[2] André Bouchet. Greedy algorithm and symmetric matroids. Math. Program. 38(2):147–159, 1987. doi:10.1007/BF02604639.
[3] Criel Merino, Iain Moffatt, and Steven Noble. The critical group of a combinatorial map. Comb. Theory 5(3), paper no. 2, 41, 2025. doi:10.5070/C65365550.
This post is based on joint work with Michela Ceria and Trygve Jonsen.
It was already four years ago that I wrote about the q-analogue of a matroid. Over these years, there have been a lot of developments in this area. A non-exhaustive list: a lot of cryptomorphisms of q-matroids have been proven [BCJ22], the direct sum has been defined (this is less trivial than it sounds!) [CJ24], there are hints of category theory [GJ23], and the representability of q-matroids has been translated to the finite geometry problem of finding certain linear sets [AJNZ24+].
In this post, I’ll talk about the q-analogue of delta-matroids. You might remember them from this choose-your-own-adventure post from Carolyn Chun. But first, let’s develop some intuition for the q-analogue of a matroid.
In combinatorics, when we talk about a q-analogue, we mean a generalisation from sets to finite dimensional vector spaces (often over a finite field). A straightforward definition of a q-matroid can be given in terms of its rank function:
Definition. A q-matroid is a pair $(E,r)$ of a finite dimensional vector space $E$ and an integer-valued function $r$ on the subspaces of $E$ such that for all $A,B\subseteq E$: (r1) $0\leq r(A)\leq\dim(A)$. (r2) If $A\subseteq B$ then $r(A)\leq r(B)$. (r3) $r(A+B)+r(A\cap B)\leq r(A)+r(B)$ (semimodularity)
Here we see that the role of the cardinality of a set is replaced by that of a dimension of a space. Inclusion and intersection are defined as one would expect, and the role of elements of a set is played by 1-dimensional subspaces in the q-analogue. The q-analogue of the union of sets is the sum of vector spaces. Here we see the first difference between the world of sets and that of spaces: where the union of sets $A$ and $B$ contains only elements that are either in $A$ or in $B$, the sum $A+B$ of vector spaces $A$ and $B$ contains a lot of 1-dimensional spaces that were in neither $A$ nor $B$. Luckily, we have semimodularity of the rank function to keep control over all these new spaces.
Lemma. Loops come in spaces.
A loop is a 1-dimensional space of rank 0. If $x$ and $y$ are loops, then by semimodularity, all 1-dimensional subspaces of $x+y$ are loops. The opposite of this result is the following.
Corollary. Independent spaces never come alone.
Suppose a q-matroid $(E,r)$ has a 1-dimensional independent space $x$. Then this q-matroid might have loops, but we know that the space $L$ containing exactly all loops (let’s call it the loop space) can have dimension at most $\dim(E)-1$, since $x$ is not a loop. But if $L$ has dimension $\dim(E)-1$, it means that all 1-dimensional spaces that are not in $L$, are independent. And there are many of them!
This reasoning motivates the definition of a q-matroid in terms of its bases [CJ24a,CJ24b]. (This definition is cryptomorphic to the one above: define a basis as a subspace such that $r(B)=r(E)$, and for the other way around, let $r(A)$ be the dimension of the biggest intersection between $A$ and a basis.)
Definition. A q-matroid is a pair $(E,\mathcal{B})$ of a finite dimensional vector space $E$ and a family $\mathcal{B}$ of subspaces of $E$ such that: (B1) $\mathcal{B}\neq\emptyset$. (B2) For all $B_1,B_2\in\mathcal{B}$ we have $\dim B_1=\dim B_2$. (B3) For all $B_1,B_2\in\mathcal{B}$, and for each subspace $A$ that has codimension 1 in $B_1$ there exists $X\subseteq E$ of codimension 1 in $E$ such that $X \supseteq A$, $X\not \supseteq B_2$ and $A+x \in \mathcal{B}$ for all 1-dimensional $x\subseteq E$, $x\not\subseteq X$.
(B1) and (B2) should not surprise you, but (B3) looks at first sight rather different from its classical counterpart. But let us translate the classical axiom a bit. We start with a basis and remove an element from it. This is the same as saying we take a subset of $B_1$ of size $|B_1|-1$. Then, we add an element from a basis $B_2$ that is not in $B_1$. In a convoluted way, this can be seen as first taking a subset $X$ of $E$ of size $n-1$ that does not contain $B_2$, and then adding the complement of $X$ in $E$ to $B_1$. However, this convoluted view does give us a statement of which the q-analogue is exactly (B3) above. Note as well that (B3) produces a lot of new bases, not just one: this is due to the fact that independent spaces never come alone.
Let us now move to delta-matroids. The definition we are going to use to make a q-analogue, is the following.
Definition. A delta-matroid is a pair $(E,\mathcal{F})$ of a finite set $E$ and a nonempty family $\mathcal{F}$ of subsets of $E$ such that for all $X,Y\in\mathcal{F}$ and for all $x\in X\triangle Y$ there is a $y\in X\triangle Y$ such that $X\triangle\{x,y\}\in\mathcal{F}$.
This definition makes use of the symmetric difference and unfortunately, we have no clue how a well-defined q-analogue of the symmetric difference looks like. (Ideas are welcome!) However, we can split this definition in four cases, depending on whether $x$ and $y$ are in $X-Y$ or in $Y-X$.
We can now make a q-analogue of a delta-matroid by treating all these four cases separately [CJJ24+].
Definition. A q-delta-matroid is a pair $(E,\mathcal{F})$ of a finite space $E$ and a nonempty family $\mathcal{F}$ of subsets of $E$ such that: (F1) For every two subspaces $X$ and $Y$ in $\mathcal{F}$, and for each subspace $A\subseteq E$ that has codimension 1 in $X$, there either exists: (i) a codimension 1 space $Z \subseteq E$ with $A \subseteq Z$ and $Y\not\subseteq Z$, such that for all 1-dimensional $z\subseteq E$, $z\not\subseteq Z$ it holds that $A+z\in \mathcal{F}$; or (ii) a codimension 1 space $Z\subseteq E$ such that $Z \cap A \in \mathcal{F}$. (F2) For every two subspaces $X$ and $Y$ in $\mathcal{F}$, and for each subspace $A\subseteq E$ with $X$ of codimension 1 in $A$, there either exists: (iii) a 1-dimensional $z\subseteq E$ with $z \subseteq A$, $z\not\subseteq Y$, such that for each $Z\subseteq E$ of codimension 1, $z\not\subseteq Z$ it holds that $A \cap Z \in \mathcal{F}$; or (iv) a 1-dimensional $z\subseteq E$ such that $A+z \in \mathcal{F}$.
The four cases of this definition reflect the four cases in the picture above, respectively. Note also the similarity between part (i) and (iii) and the basis axiom (B3). Just as in the classical case, a q-delta-matroid can be viewed as “take a q-matroid and forget that all bases need to have the same dimension”.
Here is an example of a q-delta-matroid. One can verify that this is indeed a q-delta-matroid by checking the definition above for every combination of dimensions of feasible spaces.
Example. Let $E=\mathbb{F}^4$ and $\mathcal{S}$ a spread of 2-spaces in $E$. (That is: a family of trivially intersecting 2-spaces such that every element of $E$ is in exactly one member of the spread.) Let $\mathcal{F}=\mathcal{S}\cup\{0,E\}$. Then $(E,\mathcal{F})$ is a q-delta-matroid.
The definition of a q-delta-matroid has some nice properties. First off: duality.
Theorem (dual q-delta-matroid). Let $(E,\mathcal{F})$ be a q-delta-matroid and let $\mathcal{F}^\perp=\{F^\perp:F\in\mathcal{F}\}$. Then $(E,\mathcal{F}^\perp)$ is a q-delta-matroid.
This statement follows immediately from the definition, since taking orthogonal complements in (F1) gives (F2) and vice versa. For delta-matroids there is also a notion of partial duality, also known as twist duality. We did not manage to find a q-analogue of this, largely due to the lack of q-analogue for the symmetric difference. Another concept that annoyingly does not have a straightforward q-analogue, is taking minors (via restriction and contraction) of q-delta-matroids. But for some positive news: we can make q-matroids from q-delta-matroids, and the other way around. The proofs of this statement are by directly checking the axioms.
Theorem (q-matroids from q-delta-matroids). Let $D=(E,\mathcal{F})$ be a q-delta-matroid. Then all feasible spaces of maximal dimension, and all feasible spaces of minimum dimension, are the families of bases of q-matroids. We call these the upper- and lower q-matroid of $D$.
Theorem (q-delta-matroids from q-matroids). The families of bases, independent spaces, and spanning spaces of a q-matroid all form the family of feasible spaces of a q-delta-matroid.
A much more involved result on q-delta-matroids has to do with strong maps. As in the classical case, a strong map between q-matroids is a linear map between their ground spaces where the inverse image of a flat is a flat. This leads to the definition of a q–g-matroid:
Definition. Let $\varphi:M_1\to M_2$ be a strong map between q-matroids. Then the family of all spaces contained in a basis of $M_1$ and containing a basis of $M_2$, are the feasible spaces of a q-g-matroid.
Theorem. Every q–g-matroid is a q-delta-matroid.
The inverse of this statement is not true: see the example above that is a q-delta-matroid but not a q–g-matroid, since no 1-space or 3-space is a feasible space. We do see in this example that there is a strong map between the upper q-matroid, which is $U_{4,4}$, and the lower q-matroid $U_{0,4}$. We expect this to hold in general.
Conjecture. There is a strong map between the upper- and lower q-matroid of a q-delta-matroid.
This statement was proven in the classical case via the theory of multimatroids, a concept that does not seem to have a clear q-analogue (yet). We have some hope that the birank of a q-delta-matroid (of which I’ll skip the definition) might help with this goal.
Of course, our dream is to make a q-analogue of every equivalent definition of delta-matroids. That will not be easy, because it is at the moment pie in the sky to consider a q-analogue of ribbon graphs, or embeddings of graphs — we don’t even understand yet what the q-analogue of a graph is! However, there are several more direct questions, as mentioned along the way in this post, that are waiting for interested researchers to tackle them.
References
[AJNZ24+] Gianira N. Alfarano, Relinde Jurrius, Alessandro Neri, Ferdinando Zullo, Representability of the direct sum of uniform q-matroids (2024). Preprint, arXiv:2408.00630.
[BCJ22] Eimear Byrne, Michela Ceria, Relinde Jurrius, Constructions of new q-cryptomorphisms, Journal of Combinatorial Theory, Series B, 153 (2022), pp. 149–194.
[CJ24] Michela Ceria, Relinde Jurrius, The direct sum of q-matroids. Journal of Algebraic Combinatorics, 59 (2024), pp. 291–330.
[CJ24a] Michela Ceria, Relinde Jurrius, Alternatives for the q-matroid axioms of independent spaces, bases, and spanning spaces, Advances in Applied Mathematics, 153 (2024), 102632.
[CJ24b] Michela Ceria, Relinde Jurrius, Corrigendum to Alternatives for the $q$-matroid axioms of independent spaces, bases, and spanning spaces [Adv. Appl. Math. 153 (2024) 102632] Advances in Applied Mathematics 158 (2024), 102708.
[CJJ24+] Michela Ceria, Relinde Jurrius, Trygve Johnsen, A q-analogue of $\Delta$-matroids and related concepts (2024). Preprint, arXiv:2406.14944.
[GJ23] Heide Gluesing-Luerssen, Benjamin Jany, Coproducts in categories of q-matroids, European Journal of Combinatorics, 112 (2023), 103733.